






מפסק זרם שיורי CJL1-125-B 100A 2p RCCB ELCB MCB
נתונים טכניים
| תֶקֶן | IEN61008-1 IEN62423 |
| סוּג | סוג אלקטרוני (סוג אלקטרומגנטי עזר) |
| מאפייני זרם פעולה שיורי | ו-ב' |
| פולנים | 1P+N, 3P+N |
| יכולת הפסקה תפעולית מדורגת | 10 אינץ' |
| זרם מדורג (A) | 25,40,63 |
| מתח מדורג | AC 240/415 |
| תדר מדורג | 50/60 הרץ |
| זרם פעולה שיורי מדורג I△n (A) | 0.03, 0.1 ו-0.3 |
| זרם שיורי מדורג שאינו פועל I△nno | 0.5I△n |
| זרם קצר מוגבל מדורג | 10 קא |
| זרם קצר חשמלי שיורי מוגבל מדורג l△c | 10 קילו-אמפר |
| היקף זרם ההפעלה השיורי | 0.51△n~I△n |
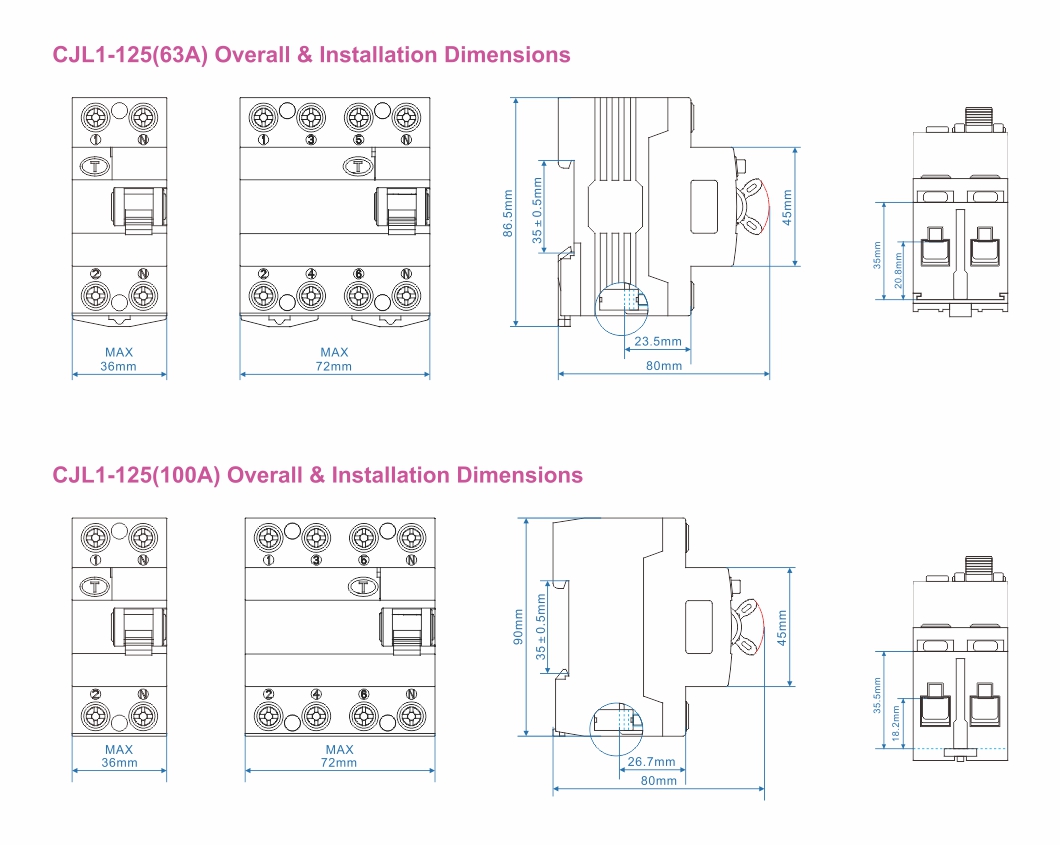
| גובה החיווט | 19 מ"מ |
| אורך חיים מכני חשמלי | 4,000 מחזורים |
| שטח חיווט של מסוף | מוליך של 25 מ"מ² ומטה |
| מסוף חיווט | מסוף בורג |
| שיטת חיווט | שיטת חיווט מסוג עמודה |
| מומנט הידוק | 2.0 ניוטון מטר |
| הַתקָנָה | התקנה של מסילת הנחיה 35.5 מ"מ / התקנה אנכית |
| דרגת הגנה על המארז | IP20 |
פרמטרים בסיסיים
| זרם מדורג של דיור ציון Inm(A) | פולנים | תֶדֶר (הרץ) | מתח מדורג Ue(V) | זרם מדורג ב(א) | שיורי מדורג זרם (A) | דירוג מוגבל קצר חשמלי בע"מ נוכחי | דירוג מוגבל קצר שיורי זרם המעגל אני△C(A) |
| 63 | 1P+N | 50/60 הרץ | 240 | 25 40 63 | 0.03 0.1 0.3 | 10000 | 10000 |
| 3P+N | 415 |
ערך סטנדרטי של זמן שבירה וזמן אי-פעולה עבור זרם שיורי DC דופק וזרם שיורי DC חלק המופק על ידי מעגל יישור
| סוּג | ב(א) | אני△n(A) | ערך סטנדרטי של זמן שבירה וזמן אי-פעולה עבור שוויון של שיורי זרם (I△A) וערכים נוספים (S) | |||
| 2 אני△ן | 4 אני△ן | 10 אני△ן | 5A, 10A, 20A, 50A, 100A, 200A | |||
| סוג כללי | כל ערך | כל ערך | 0.3 | 0.15 | 0.04 | 0.04 |
טווח זרם ההפעלה (טבלה 1)
| דֶגֶם | זרם הפעלה I△ /A | ||
| AC | 0.5 I△n<I△n | ||
| A | זווית הפיגור | אני△n>0.01A | אני△n<0.01A |
| 0° | 0.35I△n≤I△≤1.4I△n | 0.35I△n≤I△≤2I△n | |
| 90° | 0.25I△n≤I△≤1.4I△n | 0.25I△n≤I△≤2I△n | |
| 135° | 0.1I△n≤I△≤1.4I△n | 0.1I△n≤I△≤2I△n | |
שונה מ-(סוג B) של 50/60 הרץ לפי התדר (טבלה 2)
| תדר (הרץ) | זרם שיורי שאינו פועל | זרם הפעלה שיורי |
| 150 | 0.5I△n | 2.4I△n |
| 400 | 0.5I△n | 6I△n |
| 1000 | אני△n | 14I△n |
היקף ההפעלה לפי זרם שיורי DC חלק (סוג B יעמוד בדרישות הבאות בהתבסס על סוג A)
- עבור זרם שיורי AC סינוסואידלי שאינו עולה על 1000 הרץ, טווח זרם ההפעלה בין תדרים שונים בהתאם לדרישות טבלה 2. עם זרם שיורי פתאומי בטבלה 2, זמן ההפעלה לא צריך להיות יותר מ-0.3 שניות, זמן ההפעלה המינימלי ללא הפעלה מסוג S לא צריך להיות פחות מ-0.13 שניות, וזמן ההפעלה המקסימלי לא צריך לעלות על 0.5 שניות.
- אם זרם שיורי חלק של 0.4 פעמים זרם פעולה שיורי מדורג (I△n) או זרם שיורי ישר חלק של 10 מיליאמפר (הגדול יותר יגבר) חופף על זרם השיורי AC בתדר המדורג, יש להפעיל RCCB מסוג B. וזרם הטריפ AC לא יעלה על l△n.
- אם זרם שיורי DC חלק של 0.4 פעמים בזרם פעולה שיורי מדורג (I△n) או זרם שיורי DC חלק של 10 מיליאמפר (הצורה הביולוגית) חופף על פולס זרם שיורי DC, יש להפעיל RCCB מסוג B. זרם ההפעלה של RCCB עם l△n > 0.01A לא יעלה על 1.4 l△n, בעוד שזרם ההפעלה של RCCB עם l△n ≤0.01A לא יעלה על 2l△n.
- עבור זרם שיורי DC בפעימות אשר מוגבר באופן יציב ומופק על ידי שני מעגלי יישור יחסיים, מפסק שיורי מסוג B יופעל בטווח של 0.5 ליטר/ניר עד 22 ליטר/ניר. סוג B יופעל בטווח הזמן שצוין בטבלה 1, כאשר זרם שיורי DC פועם פתאומי מופעל על מעגל המיישר.
- עבור זרם שיורי DC בפעימות, אשר מוגבר באופן יציב ומופק על ידי שלושה מעגלי יישור יחסיים, יש להפעיל מפסק שיורי מסוג B בטווח של 0.5 ליטר/ניטור עד 22 ליטר/ניטור. סוג B יופעל בטווח הזמן שצוין בטבלה 1, כאשר זרם שיורי DC פועם פתאומי מופעל על מעגל המיישר.
- עבור זרם שיורי ישר חלק אשר עולה באופן יציב, יש להפעיל מפסק שיורי מסוג B בטווח של 0.5 ליטר/נייר עד 22 ליטר/נייר. סוג B יופעל בטווח הזמן שצוין בטבלה 1. כאשר זרם שיורי ישר חלק מופעל על מעגל המיישר.
- על פי טבלה 3, גל מרוכב וערך התחלתי מסופקים באופן קבוע. טווח זרם שיורי של גל מרוכב של RCCB הוא 0.5I△n עד 1.41△n, יישום פתאומי של 71△n, בדרך כלל זמן הפריצה של RCCB צריך להיות פחות מ-0.04 שניות, זמן הפריצה של RCCB מסוג S צריך להיות פחות מ-0.15 שניות.
(ערכי הרכיבים של תדרים שונים ב-teזרם ראשון וערך התחלתי נכון ומאומת כאשר הזרם המינימלי עולה בהתמדה) טבלה 3
| ערכי הרכיבים של תדרים שונים בזרם הבדיקה (RMS) | ראשי התיבות הנכונים והמאומתים ערך (RMS) | ||
| תדר מדורג | אני 1kHz | מנוע F (10 הרץ) | אני △ |
| 0.138I△n | 0.138I△n | 0.035I△n | 0.2I△n |
כתבו את הודעתכם כאן ושלחו אותה אלינו






